Adnan Khan and Noah Borel
11/29/15
Progress:
- Completed code for object tracking based on sequential frame difference.
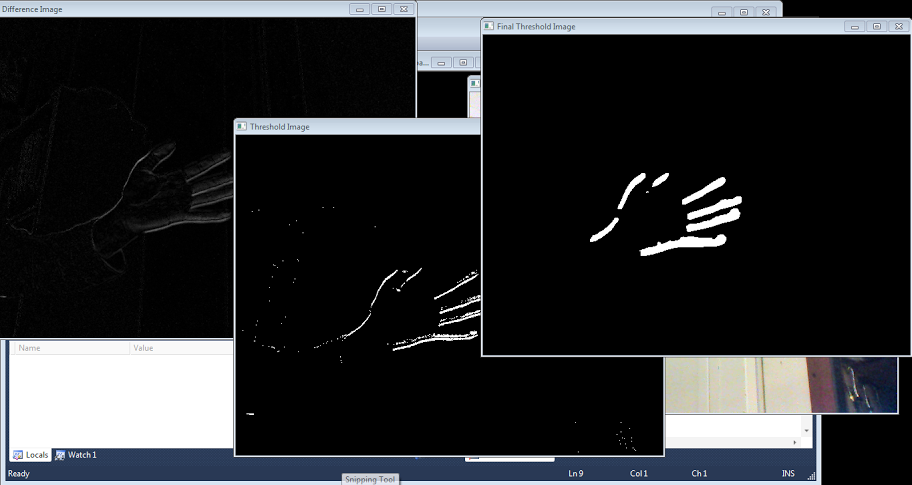
- Capture two consecutive images.
- Convert captured RGB (color) images to gray scale (black to white) images.
- Use a sensitivity value to change clarity of gray scale image.
- Use openCV absolute difference function to create a single threshold image. Threshold image is a black and white image with moving object between the original frames represented with white pixels.
- Use a blur value to expand/contract the threshold image's white pixel area.
- Add crosshair to mark object. Display x and y position values of crosshair point.
- Touch-Ups: Optimized the sensitivity and blur size to track the object easily.

Problems:
- For the object tracking code, problems arose with the object bounding rectangle. The bounding rectangle was not able to be used, so a crosshair at the center of the object was used instead.
Plan:
- Post the patent search results.
- The next step for the object tracking is to learn how to find a moving object's velocity based on captured images.
- Revisit compound eye based on finds of patent search.
No comments:
Post a Comment