Progress Report #11
Adnan Khan
2/29/16
Below is the link to the field of view calculator for the camera used in the initial tests.
The camera used is that of the Samsung Galaxy S4:
Calculator File
Download the file from Google Drive to get the original Excel file.
Guide:
- The calculator is divided into the vertical and horizontal components of the camera's field of view:
- Vertical Theta = vertical field of view angle.
- Vertical Distance = Distance between camera and edge of compound eye frame. One image is taken with the camera facing up on top of the octagon face and the other is slanted on one of the trapezoid faces.
- Vertical Distance X = Distance until the field of view of the two spot image capture locations meet vertically.
- Horizontal Theta = horizontal field of view angle.
- Horizontal Distance = Distance between camera and edge of compound eye frame. One image is taken while slanted on one of the trapezoid faces and the other is taken while slanted on an adjacent trapezoid face.
- Horizontal Distance X = Distance until the field of view of the two spot image capture locations meet horizontally.
Analysis:
- The results given by the calculator make much more sense than my calculations by hand. The calculator's results match the images taken in the initial tests.
- By creating the calculator, I was able to realize the mistake I had made when solving for the Distance X by hand. My conversions between degrees and radians had produced an incorrect result originally. The calculator, however, is able to deliver the correct resulting Vertical and Horizontal Distance X.
Monday, February 29, 2016
Tuesday, February 9, 2016
Progress Report #10
Progress Report #10
Adnan Khan
2/9/16
Progress:
- Completed construction of compound eye frame:



Problems:
- At first, the trapezoidal frames were too large. The trapezoid edges would overlap. I was able to fix this by trimming the trapezoidal sides so that they fit nicely.
- The stress of the nails and VEX Robotics metal pieces was sometimes too great for the cardboard. The nail would end up piercing all the way through the cardboard from the opposite side. I was able to fix this by attaching small VEX plates on the side where the nail enters the cardboard. With a plate on this side, the nail is unable to pierce through.
Plan:
- The webcam that is to be used with the compound eye frame has been purchased and will take a couple weeks to arrive. In the meantime, the Samsung Galaxy S4 cellphone camera will be used to capture images.
- A small holder for the webcam will be designed. This holder will be made of VEX metal pieces and will be angled so the webcam can capture images at the same angle at which the trapezoids are angled.
- Potential plan to create a new compound eye frame with a new dihedral angle. The compound eye frame with the 120° dihedral angle is too tall, thus the images captured on the trapezoidal sides do not meet with the top image taken from the octagon face:
- A larger dihedral angle would meant the blind spots of the trapezoid faces would be covered. Yet, this angle must not be too large, as then the blind spots would be at the bottom of the images. Nevertheless, in the project's scenario, a drone is more likely to be seen at the higher angle rather than at a low angle.
Adnan Khan
2/9/16
Progress:
- Completed construction of compound eye frame:
All frame pieces created and ready to be combined
Side view of completed frame:
Red annotations show 120° dihedral angle between the trapezoid sides and the octagon face.
Angled view of completed frame
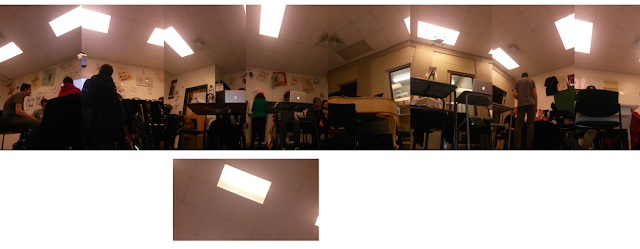
- Initial images taken using the compound eye frame. The images were captured with a Samsung Galaxy S4 cellphone. The eight images taken via the trapezoidal sides were then combined to display a single image that would simulate the image captured from a eye. The image captured from the top octagon face is shown at the bottom and is detached from the other images.

There are large blind spots between the octagon face image and the trapezoid frame images.
The blind spots are due to the 120° dihedral angle: The trapezoidal frame images are angled downward too greatly.
The blind spots are due to the 120° dihedral angle: The trapezoidal frame images are angled downward too greatly.
Problems:
- At first, the trapezoidal frames were too large. The trapezoid edges would overlap. I was able to fix this by trimming the trapezoidal sides so that they fit nicely.
- The stress of the nails and VEX Robotics metal pieces was sometimes too great for the cardboard. The nail would end up piercing all the way through the cardboard from the opposite side. I was able to fix this by attaching small VEX plates on the side where the nail enters the cardboard. With a plate on this side, the nail is unable to pierce through.
Plan:
- The webcam that is to be used with the compound eye frame has been purchased and will take a couple weeks to arrive. In the meantime, the Samsung Galaxy S4 cellphone camera will be used to capture images.
- A small holder for the webcam will be designed. This holder will be made of VEX metal pieces and will be angled so the webcam can capture images at the same angle at which the trapezoids are angled.
- Potential plan to create a new compound eye frame with a new dihedral angle. The compound eye frame with the 120° dihedral angle is too tall, thus the images captured on the trapezoidal sides do not meet with the top image taken from the octagon face:
- A larger dihedral angle would meant the blind spots of the trapezoid faces would be covered. Yet, this angle must not be too large, as then the blind spots would be at the bottom of the images. Nevertheless, in the project's scenario, a drone is more likely to be seen at the higher angle rather than at a low angle.
Subscribe to:
Comments (Atom)